|
libmove3d-planners
|


All Classes Namespaces Files Functions Variables Enumerations Enumerator Friends Macros Groups Pages
|
libmove3d-planners
|
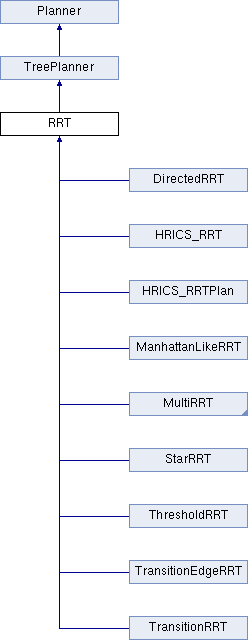
The Rapidly-exploring Random Tree (RRT) algorithm. More...
#include <RRT.hpp>
Public Member Functions | |
| RRT (Robot *robot, Graph *graph) | |
| Constructor. | |
| virtual | ~RRT () |
| Destructor. | |
| virtual unsigned | init () |
| Initialize RRT. More... | |
| virtual unsigned | run () |
| Main function of RRT. More... | |
| virtual bool | trajFound () |
| Check whether RRT has found a trajectory in the graph it is building. More... | |
| void | addConnectibleNode () |
| unsigned int | getNbConnectibleNodes () |
 Public Member Functions inherited from TreePlanner Public Member Functions inherited from TreePlanner | |
| TreePlanner (Robot *R, Graph *G) | |
| Constructor. | |
| ~TreePlanner () | |
| Destructor. | |
| virtual bool | preConditions () |
| Checks out the Pre-conditions. More... | |
| virtual bool | connectNodeToComp (Node *N, Node *CompNode) |
| Tries to connect a node to the other connected component of the graph. More... | |
| virtual bool | connectionToTheOtherCompco (Node *toNode) |
| Main function to connect to the other Connected Component. More... | |
| virtual unsigned int | expandOneStep (Node *fromComp) |
| Expands tree from component fromComp. More... | |
| bool | goalBias () const |
| Decide whether the goal bias should be applied, based on a random trial. More... | |
| double | getTime () |
| Return time in algorithm: this function must be called after ChronoTimeOfDayOn() More... | |
| int | getRunId () |
| Get the run Id. | |
| void | setRunId (int id) |
| Set the run Id. | |
| unsigned int | getNumberOfConsecutiveFail () |
| Return the number of consecutive failures observed during planification. | |
| unsigned int | getNumberOfExpansion () |
| Return the number of expansions performed during planification. | |
| unsigned int | getNumberOfFailedExpansion () |
| Return the number of expansion that failed during planification. | |
| unsigned int | getNumberOfInitialNodes () |
| Return the initial number of nodes. | |
| Node * | getLastNode () |
| Return the last node added to the graph. | |
| double | getDistanceGap () |
| Public Member Functions inherited from Planner | |
| Planner () | |
| Plain Constructor of the class. | |
| Planner (Robot *rob, Graph *graph) | |
| Constructor of the class. More... | |
| virtual | ~Planner () |
| Destructeur de la classe. | |
| Robot * | getActivRobot () |
| retourne le Robot activ More... | |
| void | setRobot (Robot *R) |
| place le Robot utilisé pour la planification More... | |
| Graph * | getActivGraph () |
| obtient le Graph actif pour la planification More... | |
| void | setGraph (Graph *G) |
| modifie le Graph actif pour la planification More... | |
| bool | setInit (confPtr_t Cs) |
| place le Node initial de la planification More... | |
| bool | setGoal (confPtr_t Cg) |
| place le Node final de la planification More... | |
| Node * | getInit () |
| obtient le Node intial de la planification More... | |
| Node * | getGoal () |
| obtient le Node final de la planification More... | |
| confPtr_t | getInitConf () |
| Get init configuration. | |
| confPtr_t | getGoalConf () |
| Get goal configuration. | |
| bool | getInitialized () |
| test si le Planner est initialisé pour la planification More... | |
| void | setInitialized (bool b) |
| modifie la valeur du Booleen de test d'initialisation More... | |
| int | getRunId () |
| Get the run Id. | |
| void | setRunId (int id) |
| Set the run Id. | |
| double | getTime () |
| return time in algorithm this function must be called after ChronoTimeOfDayOn() More... | |
| void | chronoStart () |
| void | chronoStop () |
| void | chronoUpdate () |
Protected Member Functions | |
| virtual unsigned | expandOneStep (ConnectedComponent *fromComp) |
| Perform a single expansion step of RRT, growing the given connected component. More... | |
| bool | checkStopConditions () |
| Check the stopping conditions of RRT. More... | |
| virtual API::Trajectory * | extractTrajectory () |
| Extract a trajectory from Start to Goal. | |
Protected Attributes | |
| RRTExpansion * | expansion |
| access point to the expansion procedure of RRT | |
| std::vector< double > | trajCosts |
| Protected Attributes inherited from TreePlanner | |
| int | m_runId |
| unsigned int | m_nbConscutiveFailures |
| unsigned int | m_nbExpansion |
| unsigned int | m_nbFailedExpansion |
| unsigned int | m_nbInitNodes |
| double | m_DistanceGap |
| Node * | m_last_node |
| Protected Attributes inherited from Planner | |
| int(* | _stop_func )() |
| void(* | _draw_func )() |
| confPtr_t | _q_start |
| confPtr_t | _q_goal |
| Node * | _Start |
| Le Node initial de la planification. | |
| Node * | _Goal |
| Le Node final de la planification. | |
| Robot * | _Robot |
| Le Robot pour lequel la recherche va se faire. | |
| Graph * | _Graph |
| Le Graph qui va être utilisé | |
| bool | _Init |
| Le Planner a été initialisé | |
| bool | m_fail |
| int | m_runId |
| double | m_time |
The Rapidly-exploring Random Tree (RRT) algorithm.
|
protectedvirtual |
Check the stopping conditions of RRT.
Reimplemented from TreePlanner.
Reimplemented in StarRRT, and DirectedRRT.
|
protectedvirtual |
Perform a single expansion step of RRT, growing the given connected component.
Reimplemented in DirectedRRT, and ManhattanLikeRRT.
|
inlinevirtual |
Initialize RRT.
Reimplemented from TreePlanner.
Reimplemented in TransitionEdgeRRT, TransitionRRT, ThresholdRRT, StarRRT, DirectedRRT, MultiTRRT, MultiThresholdRRT, MultiRRT, HRICS_RRT, and HRICS_RRTPlan.
|
virtual |
Main function of RRT.
Main function of RRT.
Reimplemented from TreePlanner.
Reimplemented in DirectedRRT, and MultiRRT.
|
virtual |
Check whether RRT has found a trajectory in the graph it is building.
Reimplemented from Planner.
Reimplemented in MultiRRT, and DirectedRRT.
 1.8.6
1.8.6