|
libmove3d-planners
|


All Classes Namespaces Files Functions Variables Enumerations Enumerator Friends Macros Groups Pages
|
libmove3d-planners
|
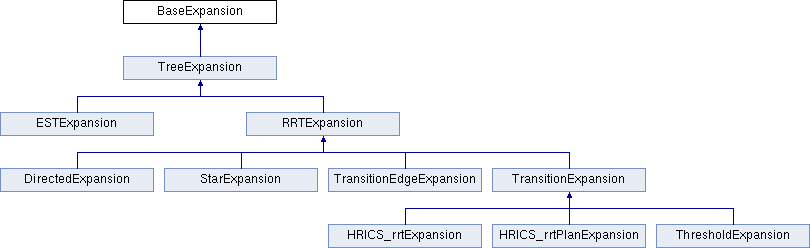
The expansion class holds the method and local variables allowing to expand a Tree in a given configuration space methods such as chose a direction, check the validity in that direction and add nodes to the tree. More...
#include <BaseExpansion.hpp>
Public Member Functions | |
| BaseExpansion () | |
| Constructor. | |
| BaseExpansion (Graph *prtGraph) | |
| ~BaseExpansion () | |
| Destructor. | |
| void | setGraph (Graph *G) |
| Set the graph that is beeing expanded. | |
| Graph * | getGraph () |
| Get the graph that is beeing expanded. | |
| int | getDirectionMethod () |
| Get Node Expansion Method. | |
| void | setDirectionMethod (int directionExpansion) |
| Set Expansion node Method. | |
| int | getNodeMethod () |
| Get Node Expansion Method. | |
| void | setNodeMethod (int nodeExpansion) |
| Set Expansion node Method. | |
| void | setFromComp (Node *fromComp) |
| Set the From Connected Component. | |
| Node * | getFromComp () |
| Get the From Connected Component. | |
| void | setToComp (Node *toComp) |
| Set the To Connected Component. | |
| Node * | getToComp () |
| Get the To Connected Component. | |
| double | step () |
| Expansion Step (Delta) More... | |
| double | getDMax () |
| double | computeInterpolationFactor (double pathLength) |
| Compute the interpolation factor along the path, based on the extension step. | |
| confPtr_t | interpolate (confPtr_t conf, LocalPath *path, double factor) |
| Interpolation along the given path. | |
| double | positionAlongPath (LocalPath &path, double param) |
| Position on localpath in [0,1]. | |
| double | pathDelta (LocalPath &path) |
| Return the path parameter that is the closest to step() | |
| LocalPath | getExtensiontPath (std::tr1::shared_ptr< Configuration > qi, std::tr1::shared_ptr< Configuration > qf) |
| Computes a localpath parameter used for expansion of at max step() of length. More... | |
| void | expansionFailed (Node &node) |
| Function called when a node can not be connected. More... | |
| virtual Node * | addNode (Node *currentNode, LocalPath &path, double pathDelta, Node *directionNode, unsigned &nbCreatedNodes) |
| Adds a node to a connected component. More... | |
| bool | refinementControl (LocalPath &path, double rho, Node &compNode) |
| Function that balances the ratio of exploration towards refinement. | |
| bool | nextStep (LocalPath &path, std::tr1::shared_ptr< Configuration > &directionConfig, double &pathDelta, std::tr1::shared_ptr< LocalPath > &newPath, Env::expansionMethod method) |
| Returns a valid configuration on the local path. | |
| bool | nextStep (LocalPath &path, Node *directionNode, double &pathDelta, std::tr1::shared_ptr< LocalPath > &newPath, Env::expansionMethod method) |
| Returns a valid configuration on the local path. | |
| virtual Node * | getExpansionNode (Node *compNode, confPtr_t direction, int distance) |
| Gets the nearest node in the graph. More... | |
|
std::tr1::shared_ptr < Configuration > | getExpansionDirection (Node *expandComp, Node *goalComp, bool samplePassive, Node *&directionNode) |
| Node * | getLasAddedNode () |
| Return last added node. | |
| void | addConnectibleNode () |
| unsigned int | getNbConnectibleNodes () |
Protected Attributes | |
| int | m_ExpansionNodeMethod |
| int | m_MaxExpandNodeFailure |
| int | m_kNearestPercent |
| int | m_ExpansionDirectionMethod |
| bool | m_IsDirSampleWithRlg |
| Graph * | m_Graph |
| Node * | m_last_added_node |
| Node * | m_fromComp |
| Node * | m_toComp |
| unsigned int | _nbConnectibleNodes |
The expansion class holds the method and local variables allowing to expand a Tree in a given configuration space methods such as chose a direction, check the validity in that direction and add nodes to the tree.
|
virtual |
Adds a node to a connected component.
Function that adds a node to the graph.
Reimplemented in HRICS_rrtExpansion, and HRICS_rrtPlanExpansion.
| void BaseExpansion::expansionFailed | ( | Node & | node | ) |
Function called when a node can not be connected.
Function called when an expansion fails.
| the | node which has not been connected |
|
virtual |
Gets the nearest node in the graph.
| compNode | Expanding component |
| direction | Direction of expansion |
| Sampling | passive mode |
| LocalPath BaseExpansion::getExtensiontPath | ( | std::tr1::shared_ptr< Configuration > | qi, |
| std::tr1::shared_ptr< Configuration > | qf | ||
| ) |
Computes a localpath parameter used for expansion of at max step() of length.
Returns the localpath of length equal or inferior to step.
| double BaseExpansion::step | ( | ) |
Expansion Step (Delta)
Returns a distance define by the environement.
 1.8.6
1.8.6