Components library¶
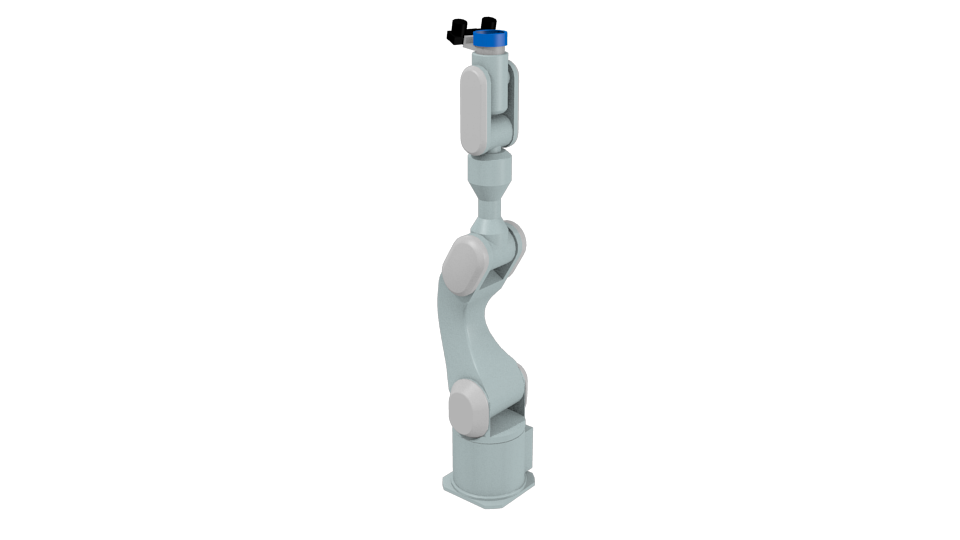
MORSE offers an extended set of predefined sensors and actuators that cover reasonably well the common robotics simulation needs. It also includes some fully equipped robots.
Available components¶
Robots and robotic bases¶
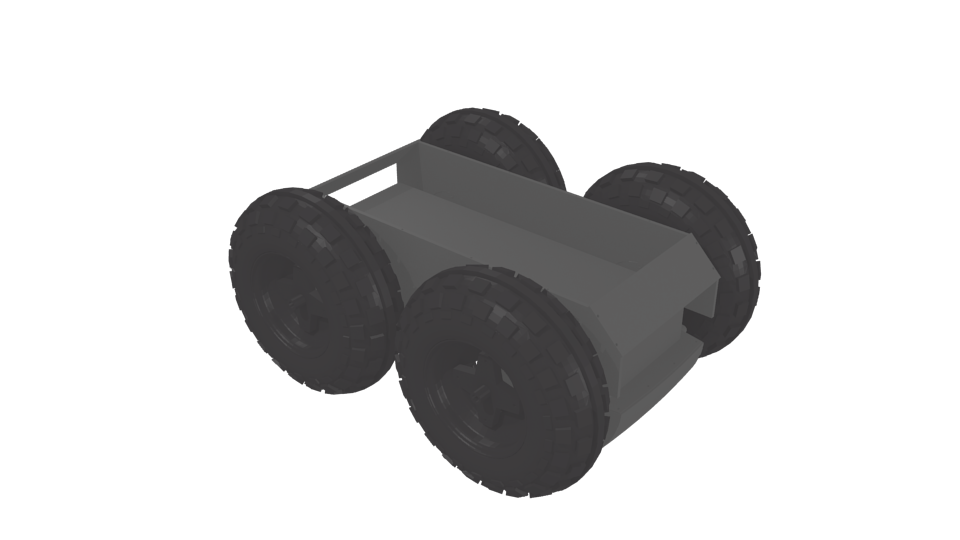
 atrv |
 b21 |
 hummer |
 jido |
 morsy |
 patrolbot |
 pioneer3dx |
 pr2 |
 quadrotor |
 quadrotor_dynamic |
 rmax |
 segwayrmp400 |
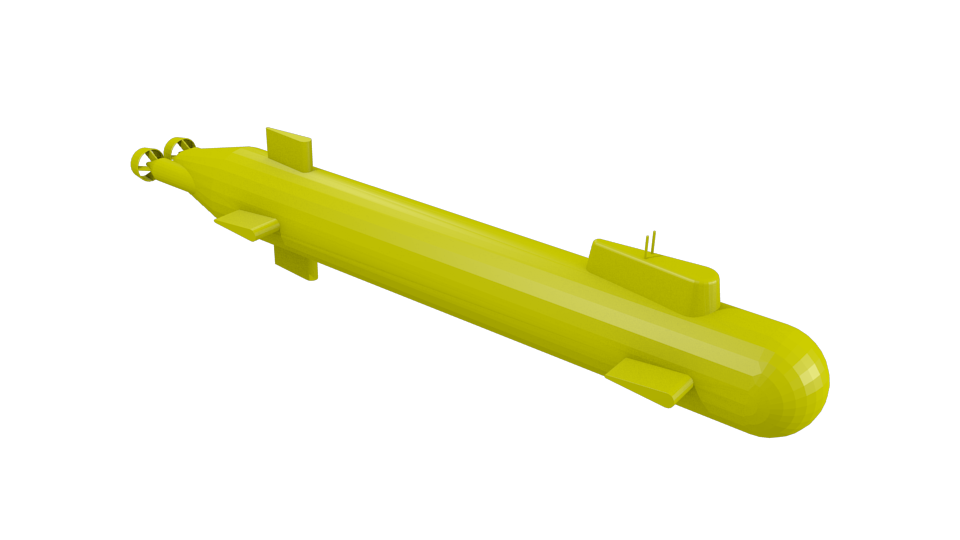 submarine |
Sensors¶
 battery |
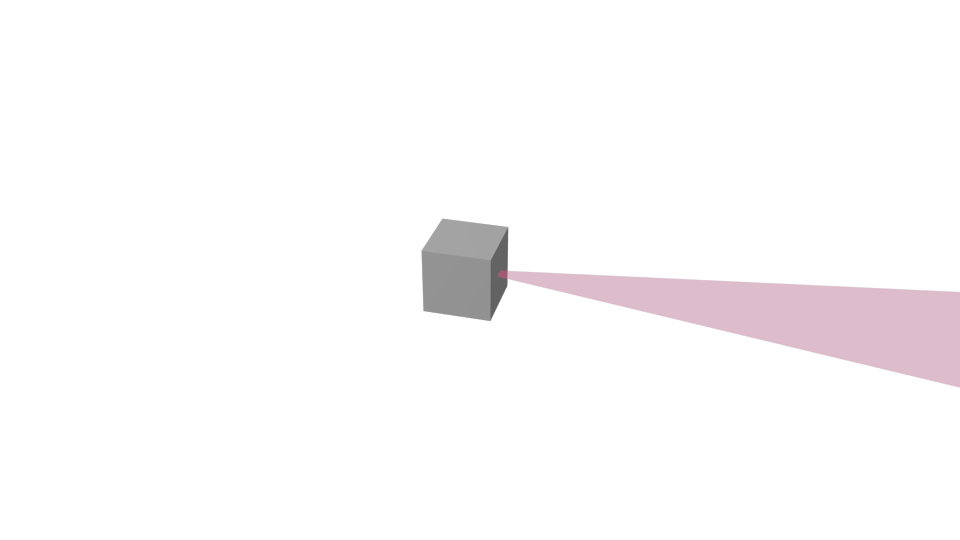
 depth_camera |
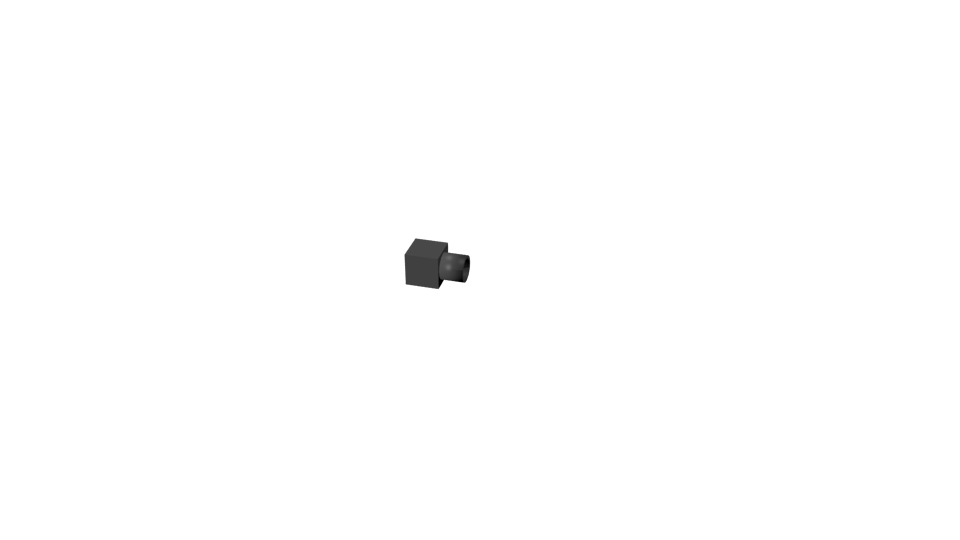
 infrared |
 laserscanner |
 velodyne |
 video_camera |
- Accelerometer
- Airspeed
- Armature Pose Sensor
- Attitude sensor
- Barometer
- Battery Sensor
- Generic Camera
- Clock
- Collision
- Compound Sensor
- Depth camera (raw Z-Buffer)
- Depth Camera Aggregator Unit
- GPS
- Gyroscope
- Hokuyo
- Human Posture
- Inertial measurement unit
- Infrared Proximity Sensor
- Kinect
- Laser Scanner Sensors
- Magnetometer
- Odometry
- Pose
- Proximity Sensor
- PTU Pose Sensor
- Radar Altimeter
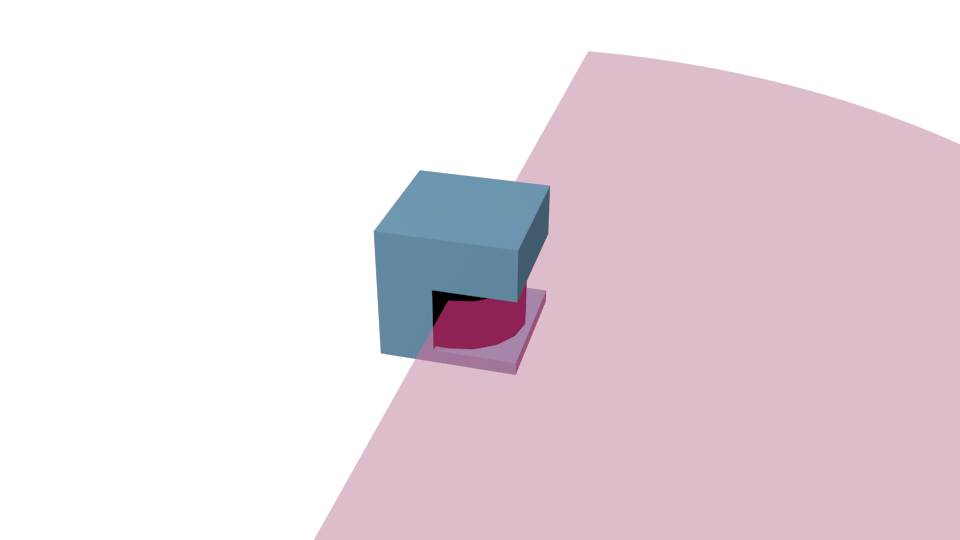
- Search And Rescue sensor
- Semantic camera
- SICK
- SICK LD-MRS
- Stereo Camera Unit
- Thermometer Sensor
- Velocity
- Video camera
Actuators¶
 kuka_lwr |
 pa_10 |
- Armature Actuator
- ArUco Marker
- Destination
- Drag
- External Force/Torque
- Force/Torque Motion Controller
- Gripper
- Joystick Actuator
- Keyboard Actuator
- KUKA LWR
- Light
- Orientation Actuator
- Mitsubishi PA-10
- Pan-Tilt Unit
- Quadrotor dynamic controller
- Rotorcraft attitude motion controller
- Rotorcraft Velocity motion controller
- Rotorcraft Waypoint motion controller
- Sound
- Stabilized Flight for quadrotor
- Steer/Force Actuator
- Teleport
- Linear and angular speed (V, W) actuator
- Differential Driver Actuator: Linear and angular speed (V, W) actuator
- Waypoint
- Linear and angular speed (Vx, Vy, W) actuator
Environments¶

While you can easily create your own environment (any Blender scene will do!), MORSE also provides a set of predefined 3D environments for your simulations.
Working with components¶
The following diagram shows the data flow from the simulation to the sensor, then the modifiers and finally the middleware to send the data to external programs:
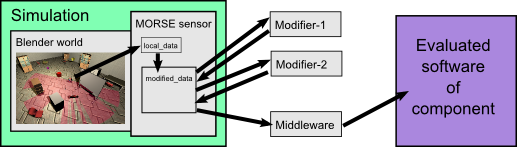
The data flow is similar for actuators, except that the direction is inverted, with the data arriving first from the evaluated software via the middleware, then processed by the modifiers and finally applied in the simulation.
To interact with the outside world, components rely on middlewares connected to Blender. See also the list of supported middlewares and language bindings for a further explanation.
Check the Features compatibility matrix to see which components are supported for each middleware.
Modifiers: Post-process your data¶
MORSE also provides ways to alter input or output data (like adding noise to a GPS position) using modifiers.
Overlays: Adapt to your architecture¶
MORSE features a mechanism called component overlays to easily create pseudo-sensors or actuators that fit your specific architecture.
Adding your own components¶
To learn how to create new components (e.g., actuators, sensors, and robots), please refer to the developer documentation.