Predefined Environments¶
MORSE ships with a set of predefined indoor and outdoor 3D environments you can use.
You can also use your own environments by simply specifying the full path of a
Blender file in the Environment object of your Builder script.
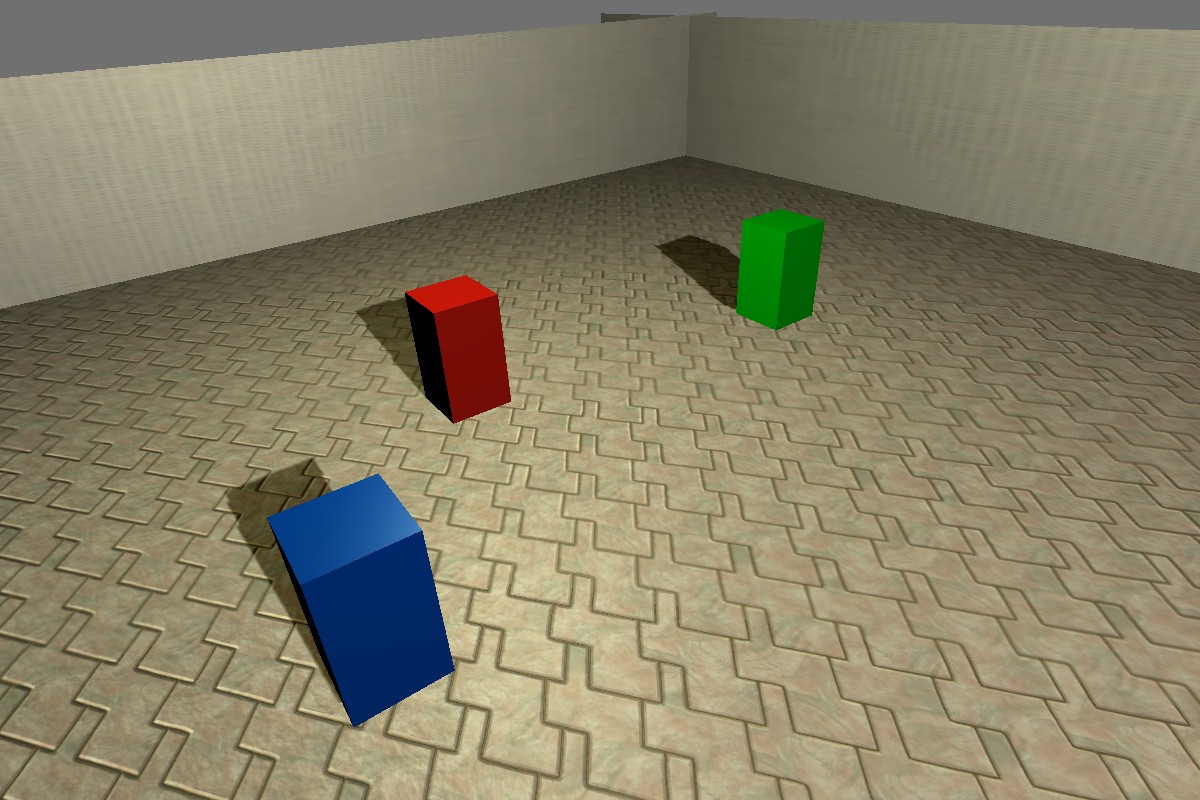 boxes |
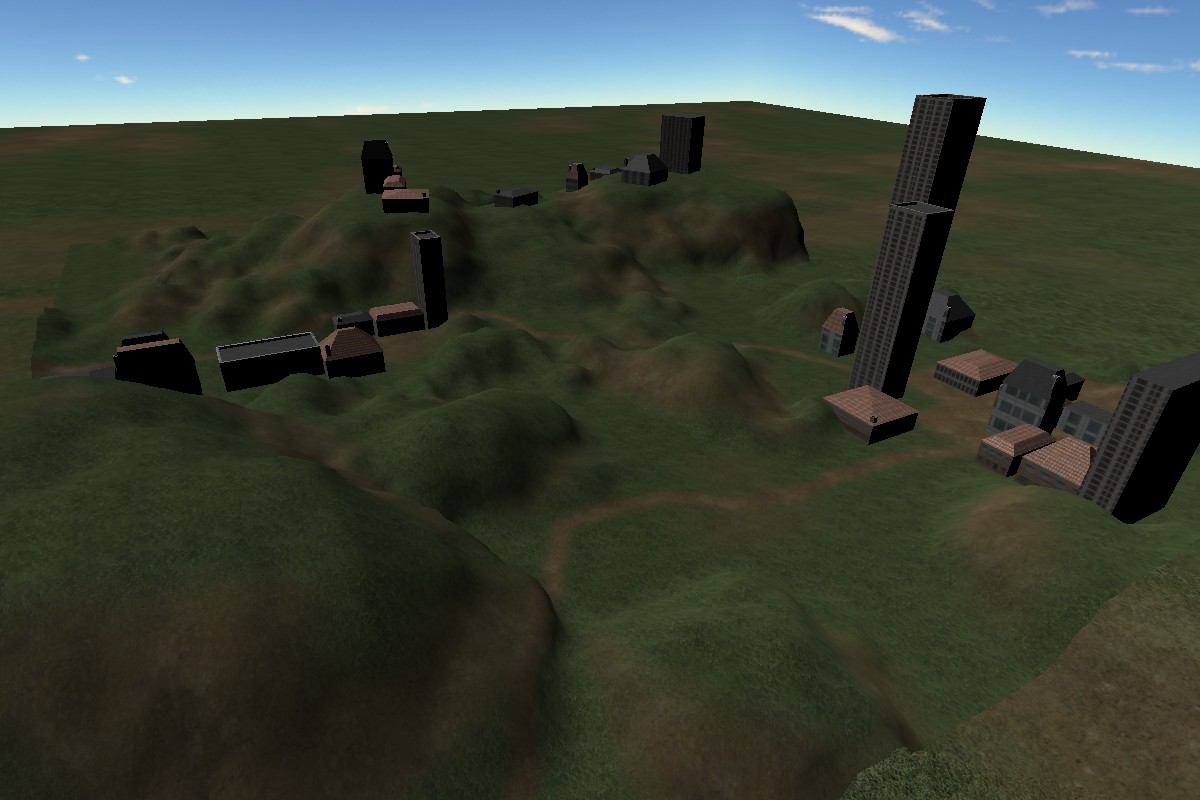 buildings_1 |
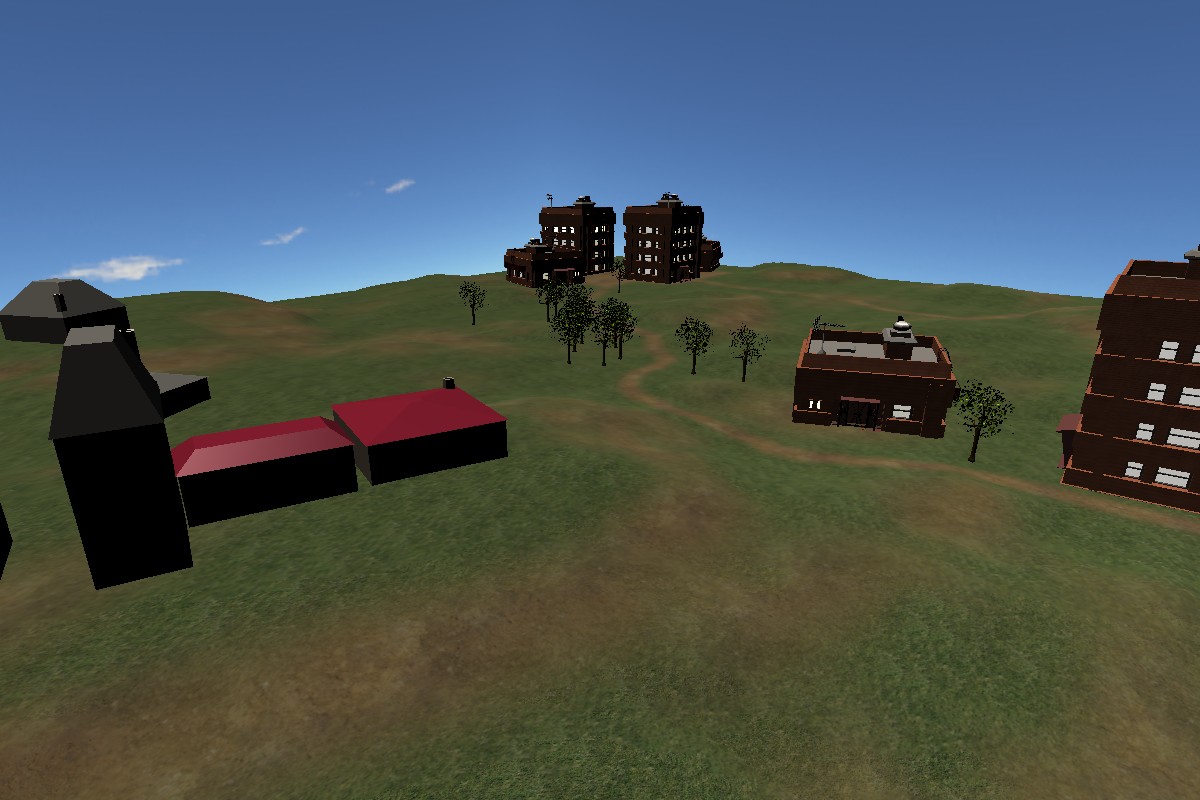 buildings_2 |
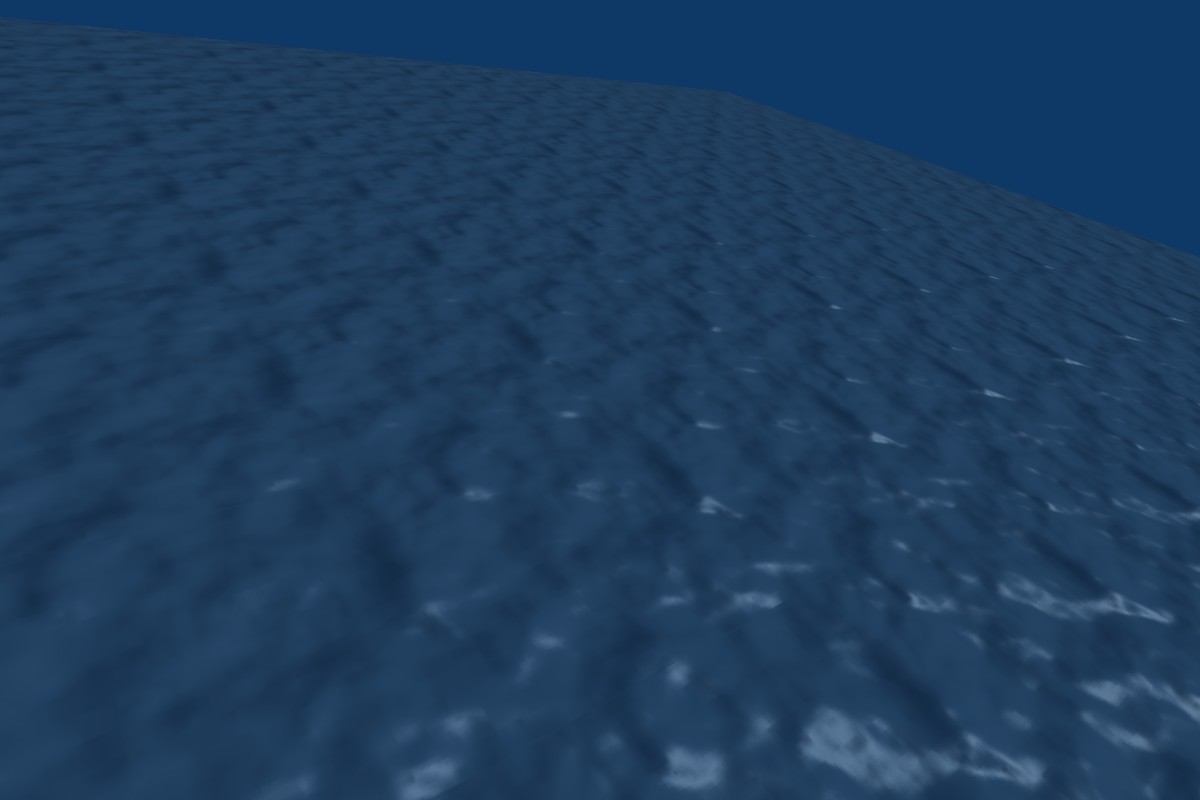 deep_water |
 grande_salle |
 indoor-1 |
 outdoors |
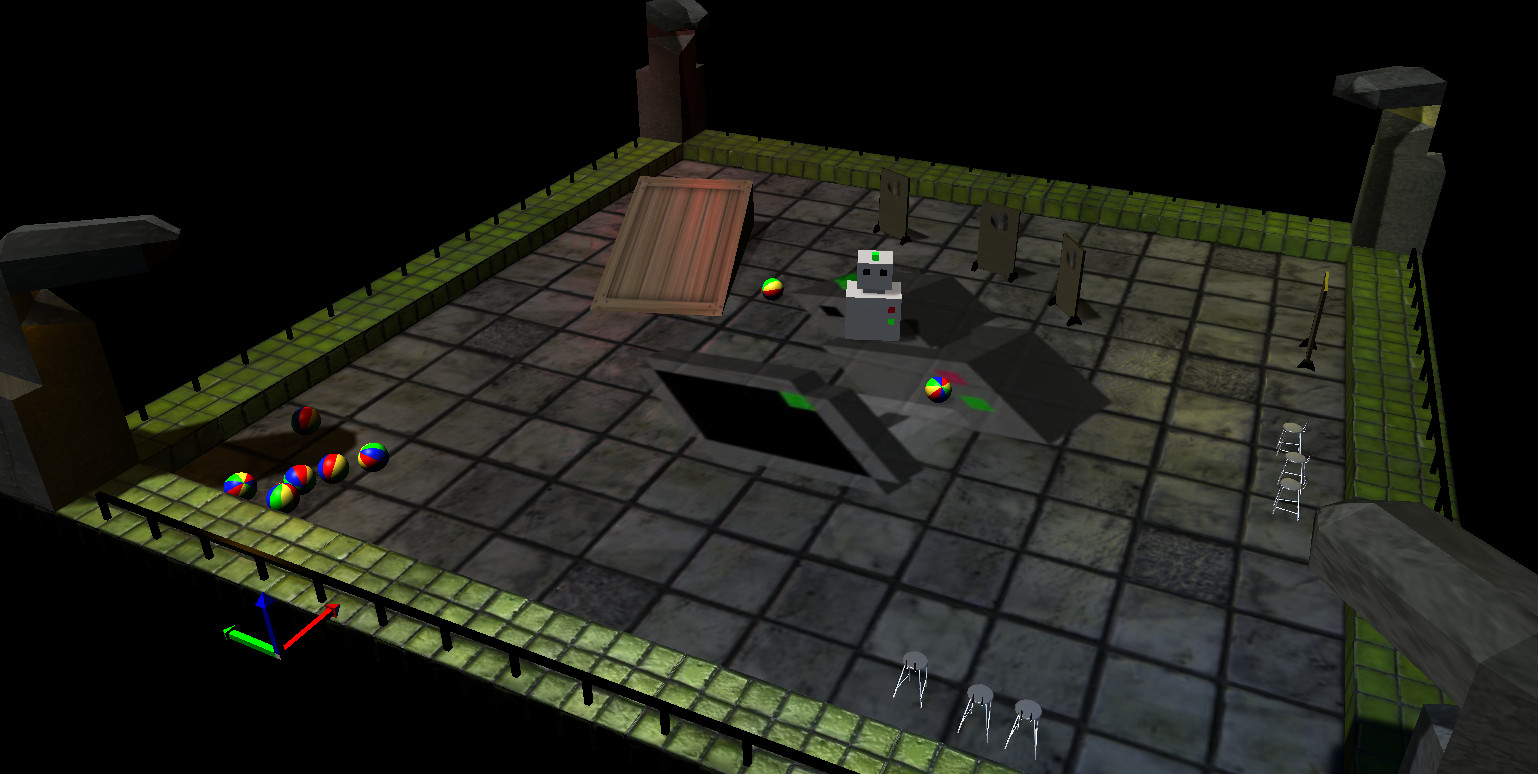 sandbox |
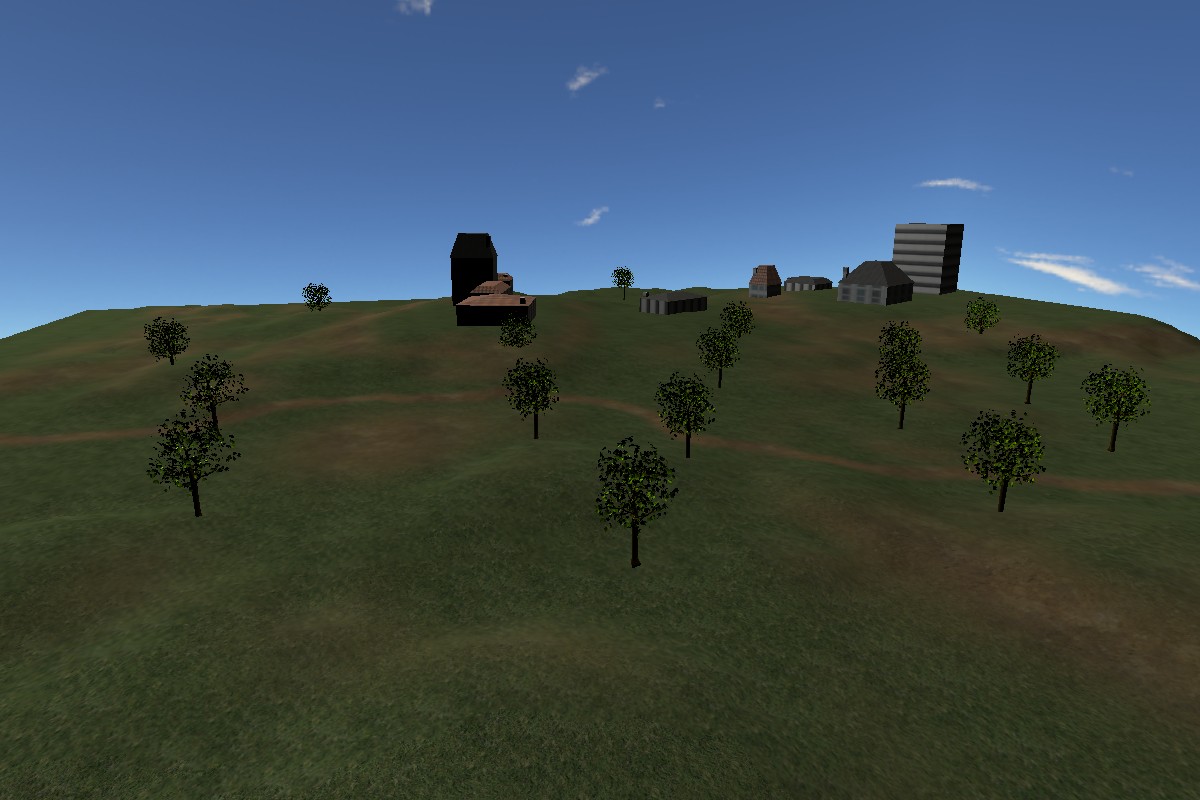 trees |
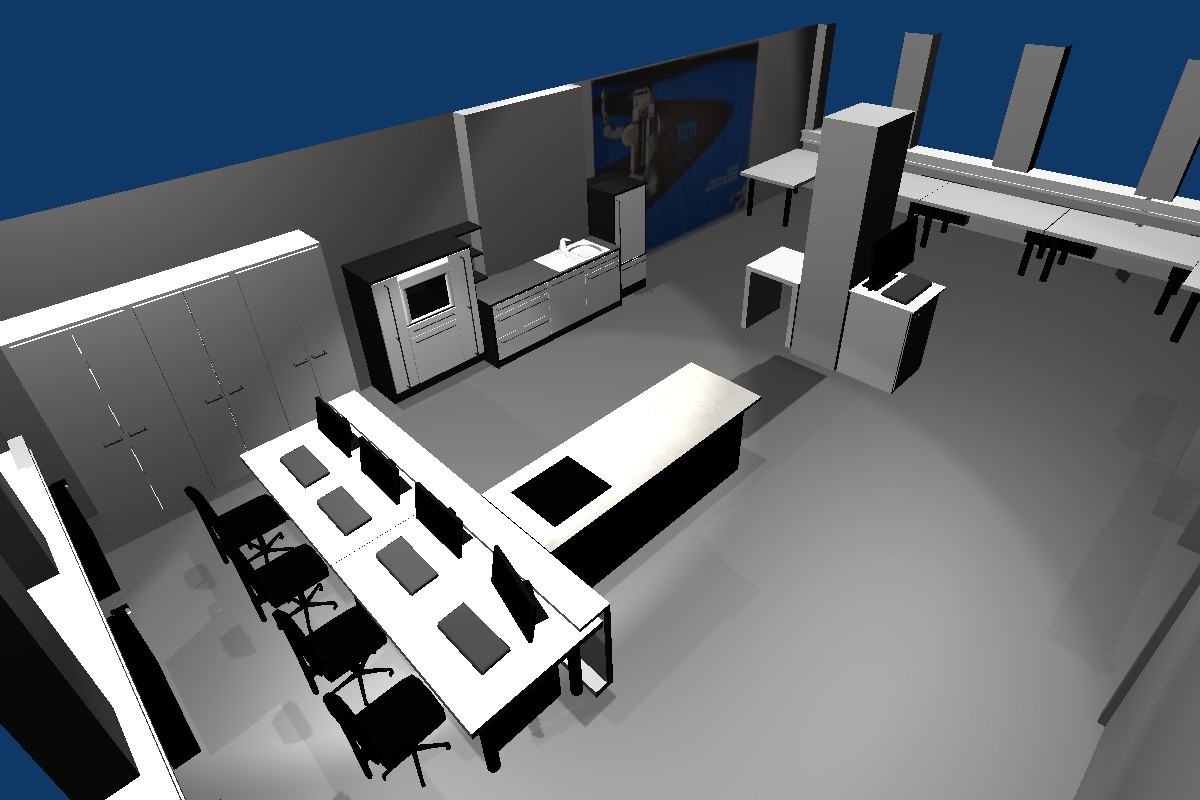 tum_kitchen |
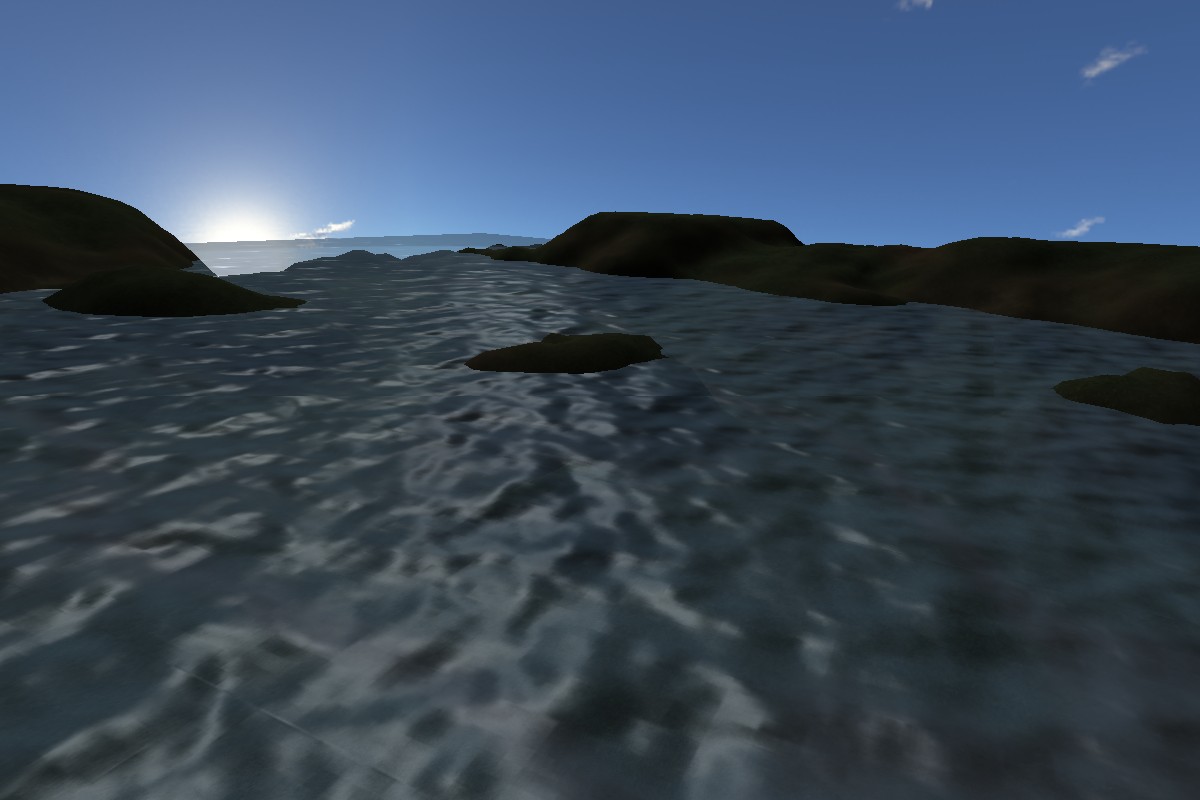 water_scene |
Note
Include these robots in your simulation by using the identifier below the pictures:
from morse.builder import *
#...
env = Environment('<path>/<identifier>')
Check the source to know the
right path (e.g., land-1/tree).