Media¶
Videos¶
A compilation of simulated scenarios used in several research laboratories. |
Using the ROS RVIZ visualisation tool to display a simulated camera’s video stream |
Some examples of integration between MORSE and ROS in a human-robot interaction context. |
MORSE can take care of navigation if you do not want to manage this part. |
Here, a robot builds a 2.5D terrain model map from simulated stereo-cameras, and uses it to navigate. |
Several robots following each other. Each robot streams its camera, here with YARP. |
MORSE can be used to test human-robot interaction scenarios, where a human avatar is controlled as in a video game. |
MORSE simulates a Velodyne used to build a map of the environment. |
More videos are available on the Blender for Robotics Vimeo group.
Screenshots¶

Simulation of ground-air cooperation. |

Real-time simulation of a SICK laser range finder in an indoor environment. |

An ATRV in an outdoor scenario. |
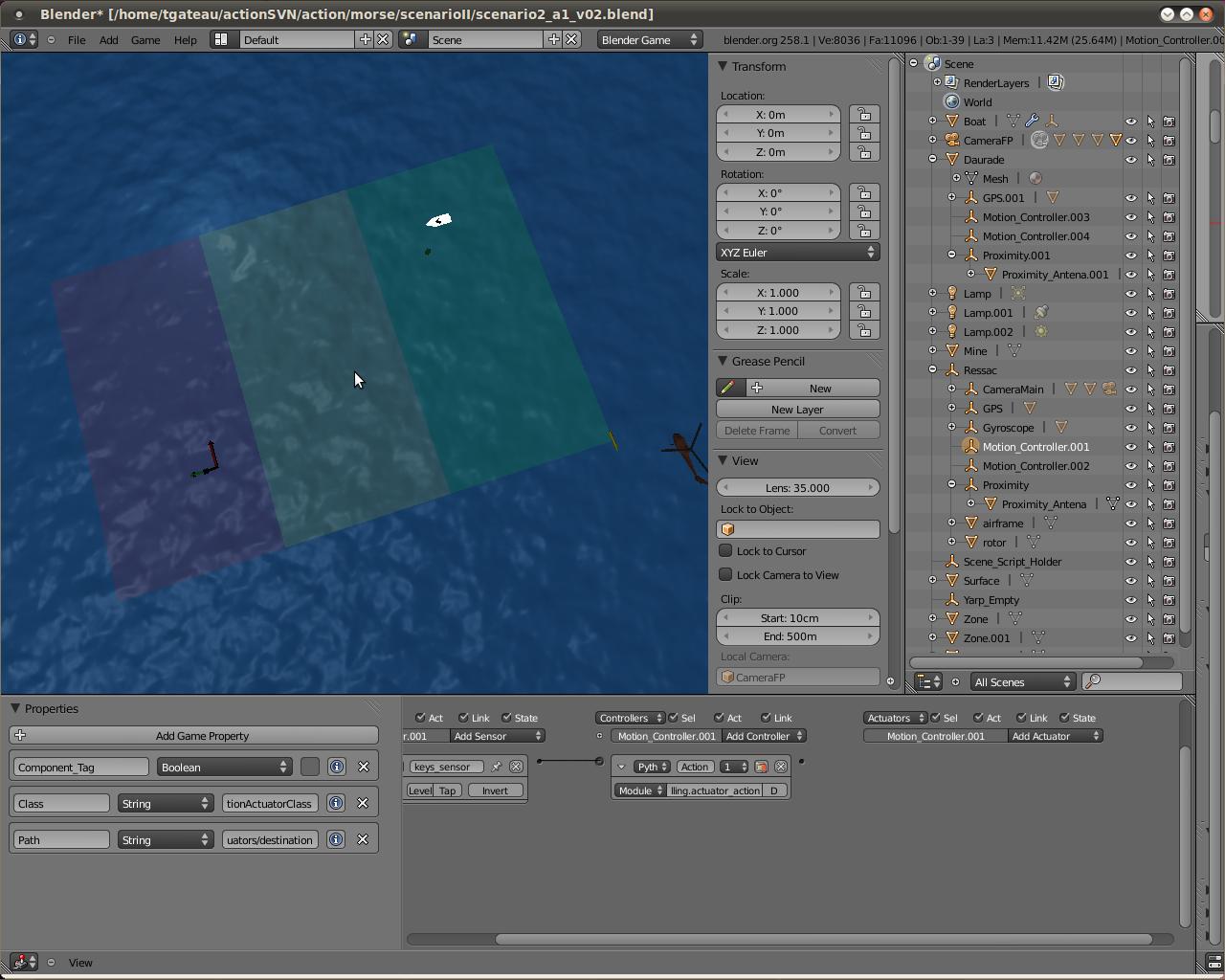
Cooperation between a helicopter and a submarine for mine hunting. |
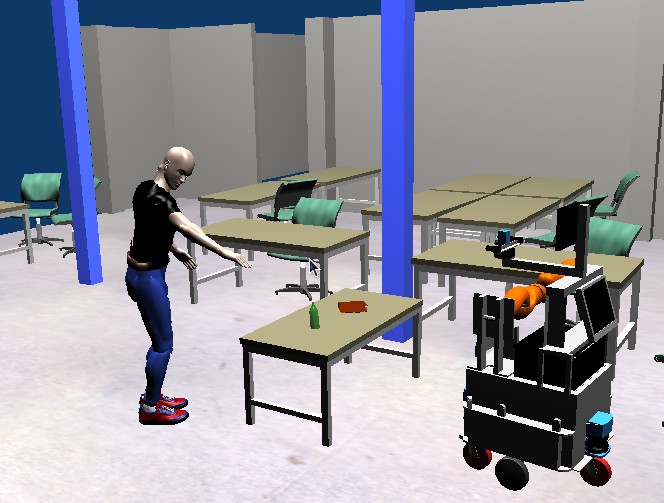
Simulation of human-robot interaction: the robot tracks the human’s posture. |
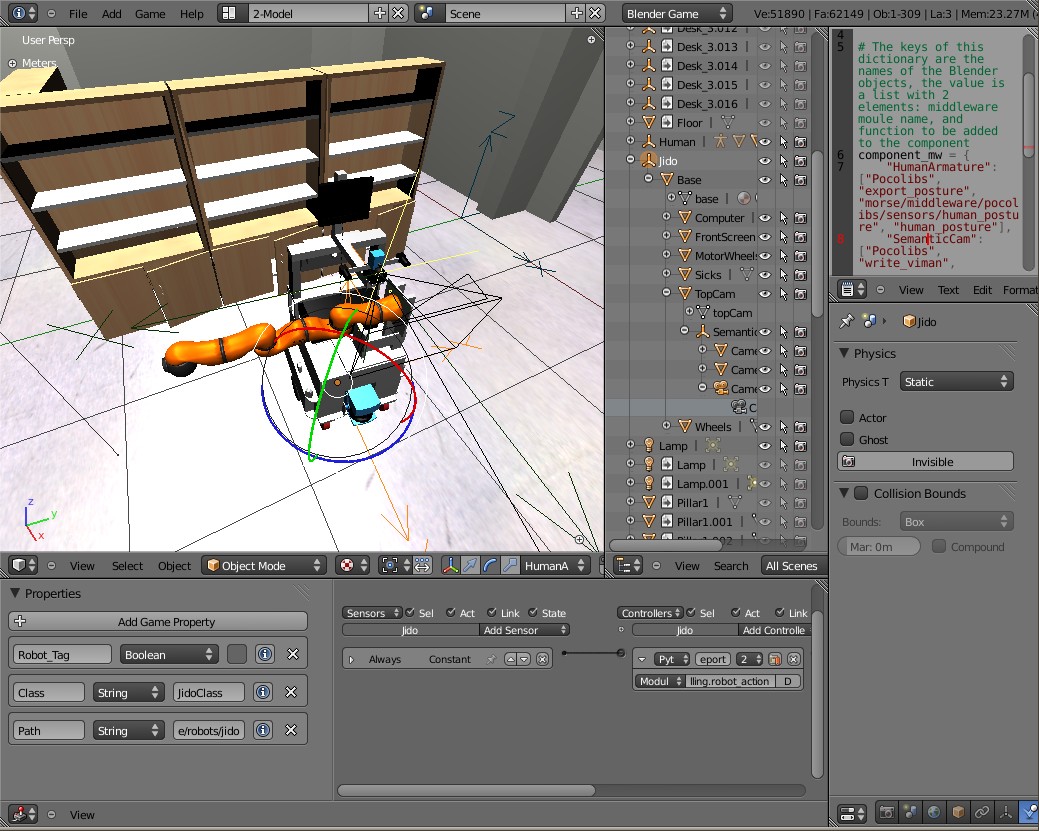
The MORSE interface (crude Blender :-) ) |