How to efficiently add complex bounding boxes to your objects¶
It is often important to simplify the bounding box of complex objects (i.e.,
replace a complex Triangle Mesh with a set of simpler boxes or spheres for
instance), to ensure good performance of the MORSE physics engine (Bullet).
Here is an example of how to simplify a bounding box.
Let’s consider an object called, for example, RollingChair.
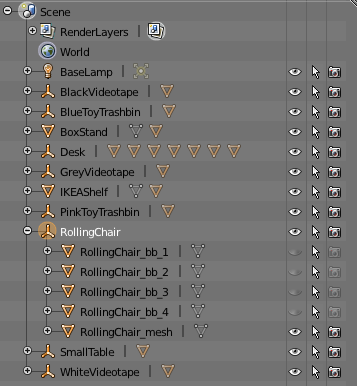
- Append a
_meshsuffix to its name (e.g.,RollingChair_mesh). - In the Physics properties panel, disable the physics for this object (
No Collision). - Create plain boxes and put them around the object to shape the bounds. Name
them after your object, appending a suffix (like
RollingChair_bb_xx, as shown in the image above). - Apply scaling (Ctrl-a) on each box.
- Create a new
Emptyand name it after the object (in our exampleRollingChair). Place the empty at the origin of the object (it will correspond to the position of the object in MORSE). - Parent all bounding boxes and the original object mesh to this empty (select all the objects ending with the empty, and press Shift+M).
- In the Physics properties, set the empty to be a
RigidBody. Also set its other properties like its mass and translation/rotation damping. - Set the physics properties for all other boxes belonging to the bounding
box to
RigidBody, not forgetting to set the radius to be smaller than the box. All the boxes must have theirCollision boundsset toBoxandCompoundmust be selected. Leave the other physics properties to their defaults. - All the bounding boxes can also be set to
Invisiblein the same Physics panel.
Check the passive objects doc for details on the creation of objects in general.