Human Posture (kinect version)¶
This sensor collects the positions of the bones in the human armature for the file $MORSE_ROOT/data/robots/mocap_human.blend.
It stores the position and orientation of the general armature object, as well as the local rotation of each individual bone. The rotation angles are given in radians. It exports the same interface than the human posture sensor, but some joints are not reflected by the Kinect, and so they stay to their initial values.
This sensor will only work for the mocap_human.blend model, as it uses a specific naming convention for each of the bones.
You can also check to general documentation of the human component.
Configuration parameters for Human Posture (kinect version)¶
No configurable parameter.
Data fields¶
This sensor exports these datafields at each simulation step:
- timestamp (float, initial value: 0.0)
number of seconds in simulated time
- x (float, initial value: 0.0)
global X position of the armature in the scene, in meter
- y (float, initial value: 0.0)
global Y position of the armature in the scene, in meter
- z (float, initial value: 0.0)
global Z position of the armature in the scene, in meter
- yaw (float, initial value: 0.0)
rotation angle with respect to the Z axis, in radian
- pitch (float, initial value: 0.0)
rotation angle with respect to the Z axis, in radian
- roll (float, initial value: 0.0)
rotation angle with respect to the Z axis, in radian
- empty1 (float, initial value: 0.0)
(no documentation available yet)
- empty2 (float, initial value: 0.0)
(no documentation available yet)
- empty3 (float, initial value: 0.0)
(no documentation available yet)
- empty4 (float, initial value: 0.0)
(no documentation available yet)
- empty5 (float, initial value: 0.0)
(no documentation available yet)
- empty6 (float, initial value: 0.0)
(no documentation available yet)
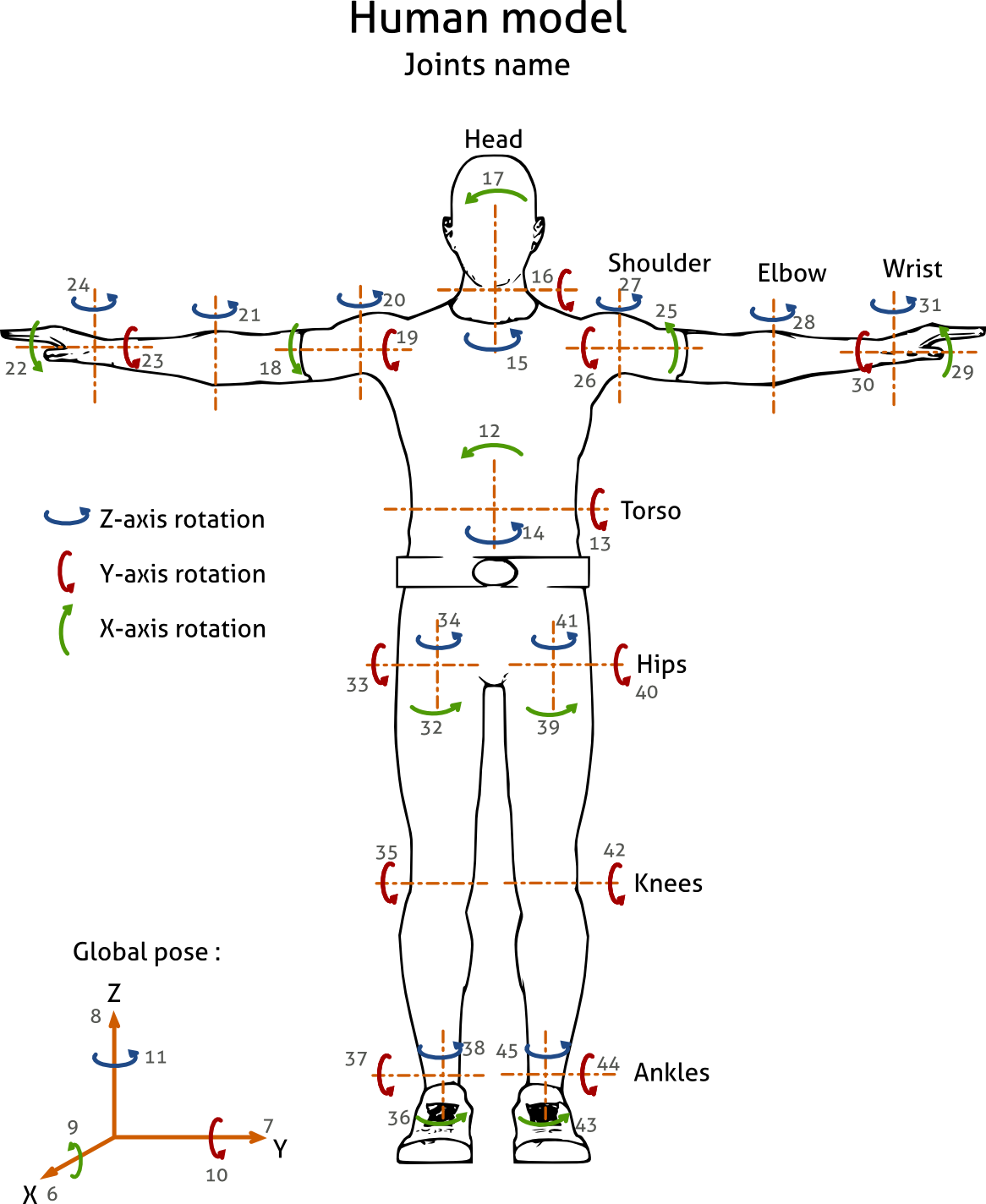
- dof_12 (float, initial value: 0.0)
rotation around the X axis for the torso, in radian
- dof_13 (float, initial value: 0.0)
rotation around the Y axis for the torso, in radian
- dof_14 (float, initial value: 0.0)
rotation around the Z axis for the torso, in radian
- dof_15 (float, initial value: 0.0)
rotation around the Z axis for the head, in radian
- dof_16 (float, initial value: 0.0)
rotation around the Y axis for the head, in radian
- dof_17 (float, initial value: 0.0)
rotation around the X axis for the head, in radian
- dof_18 (float, initial value: 0.0)
rotation around the X axis for the right shoulder, in radian
- dof_19 (float, initial value: 0.0)
rotation around the Y axis for the right shoulder, in radian
- dof_20 (float, initial value: 0.0)
rotation around the Z axis for the right shoulder, in radian
- dof_21 (float, initial value: 0.0)
elongation of the right arm, in meter (not computed)
- dof_22 (float, initial value: 0.0)
rotation around the Z axis for the right elbow, in radian
- dof_23 (float, initial value: 0.0)
R_POINT (not computed)
- dof_24 (float, initial value: 0.0)
rotation around the X axis for the right wrist, in radian (not computed)
- dof_25 (float, initial value: 0.0)
rotation around the Y axis for the right wrist, in radian (not computed)
- dof_26 (float, initial value: 0.0)
rotation around the Z axis for the right write, in radian (not computed
- dof_27 (float, initial value: 0.0)
rotation around the X axis for the left shoulder, in radian
- dof_28 (float, initial value: 0.0)
rotation around the Y axis for the left shoulder, in radian
- dof_29 (float, initial value: 0.0)
rotation around the Z axis for the left shoulder, in radian
- dof_30 (float, initial value: 0.0)
elongation of the left arm, in meter (not computed)
- dof_31 (float, initial value: 0.0)
rotation around the Z axis for the left elbow, in radian
- dof_32 (float, initial value: 0.0)
L_POINT (not computed)
- dof_33 (float, initial value: 0.0)
rotation around the X axis for the left wrist, in radian (not computed)
- dof_34 (float, initial value: 0.0)
rotation around the Y axis for the left wrist, in radian (not computed)
- dof_35 (float, initial value: 0.0)
rotation around the Z axis for the left wrist, in radian (not computed)
- dof_36 (float, initial value: 0.0)
rotation around the X axis for the right hip, in radian
- dof_37 (float, initial value: 0.0)
rotation around the Y axis for the right hip, in radian
- dof_38 (float, initial value: 0.0)
rotation around the Z axis for the right hip, in radian
- dof_39 (float, initial value: 0.0)
rotation around the Z axis for the right knee, in radian
- dof_40 (float, initial value: 0.0)
rotation around the X axis for the right ankle, in radian (not computed)
- dof_41 (float, initial value: 0.0)
rotation around the Y axis for the right ankle, in radian (not computed)
- dof_42 (float, initial value: 0.0)
rotation around the Z axis for the right ankle, in radian (not compued)
- dof_43 (float, initial value: 0.0)
rotation around the X axis for the left hip, in radian
- dof_44 (float, initial value: 0.0)
rotation around the Y axis for the left hip, in radian
- dof_45 (float, initial value: 0.0)
rotation around the Z axis for the left hip, in radian
- dof_46 (float, initial value: 0.0)
rotation around the Z axis for the left knee, in radian
- dof_47 (float, initial value: 0.0)
rotation around the X axis for the left ankle, in radian (not computed)
- dof_48 (float, initial value: 0.0)
rotation around the Y axis for the left ankle, in radian (not computed)
- dof_49 (float, initial value: 0.0)
rotation around the Z axis for the left ankle, in radian (not computed)
Interface support:
(attention, no interface support!)
Services for Human Posture (kinect version)¶
- set_property(prop_name, prop_val) (blocking)
Modify one property on a component
Parameters
- prop_name: the name of the property to modify (as shown the documentation)
- prop_val: the new value of the property. Note that there is no checking about the type of the value so be careful
Return value
nothing
- get_properties() (blocking)
Returns the properties of a component.
Return value
a dictionary of the current component’s properties
- get_local_data() (blocking)
Returns the current data stored in the sensor.
Return value
a dictionary of the current sensor’s data
- get_configurations() (blocking)
Returns the configurations of a component (parsed from the properties).
Return value
a dictionary of the current component’s configurations
Examples¶
The following examples show how to use this component in a Builder script:
from morse.builder import *
# adds a default robot (the MORSE mascott!)
robot = Morsy()
# creates a new instance of the sensor
humanposture = HumanPosture()
# place your component at the correct location
humanposture.translate(<x>, <y>, <z>)
humanposture.rotate(<rx>, <ry>, <rz>)
robot.append(humanposture)
# define one or several communication interface, like 'socket'
humanposture.add_interface(<interface>)
env = Environment('empty')
Other sources of examples¶
(This page has been auto-generated from MORSE module morse.sensors.mocap_posture.)