The human component in MORSE¶
MORSE allows the simulation of humans: you can add a human model in your scene, you can control it from the keyboard and mouse during the simulation (move it around, sit it down, pick and place objects...), and export to your robotic systems various data (currently only the position and joint state).
The human is handled inside MORSE as a robot, which means it can have sensors and actuators attached to it.
For a general introduction to human-robot interaction simulation with MORSE, check the HRI main page.
Files¶
- Blender: $MORSE_ROOT/data/robots/human.blend
- Python:
- $MORSE_ROOT/src/morse/robots/human.py
- $MORSE_ROOT/src/morse/blender/human_interaction/*
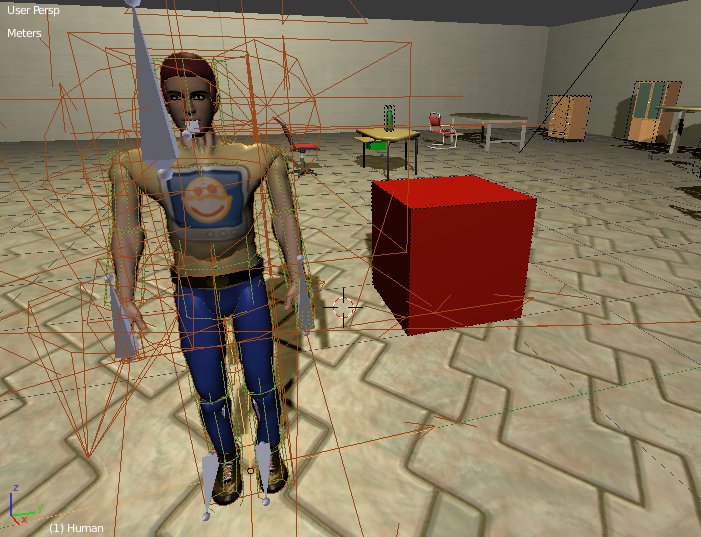
Inserting the human in your scene¶
The procedure to insert a human in your simulation is slightly different than for other assets.
From Blender interface¶
You can append a human while editing a scenario in Blender by importing the Human group available in $MORSE_ROOT/data/robots/human.blend.
If the model do not appear, it has probably be added to an invisible layer. Check in the layers panel.
With the Builder API¶
To add a human with the MORSE Builder API, you just need to instantiate the morse.builder.robots.human.Human class.
from morse.builder import *
human = Human()
If you want to use the World Camera initially, add
human.use_world_camera()
The human posture component can then be accessed through the armature member.
Usage example:
#! /usr/bin/env morseexec
from morse.builder import *
human = Human()
human.translate(x=5.5, y=-3.2, z=0.0)
human.rotate(z=-3.0)
human.armature.add_stream('pocolibs')
Simulation with multiple Humans¶
There are two ways of using multiple Human in one Simulation. The first one is through the use of actuators. For this you should disable the keyboard control for every instance you don’t need it for:
human.disable_keyboard_control()
This way you can control only one Human via keyboard control.
If you need more than one Human that is controlled by a user you can use a Multinode Simulation.
Note
You can only control one Human per node with the keyboard control so that they can move independently.
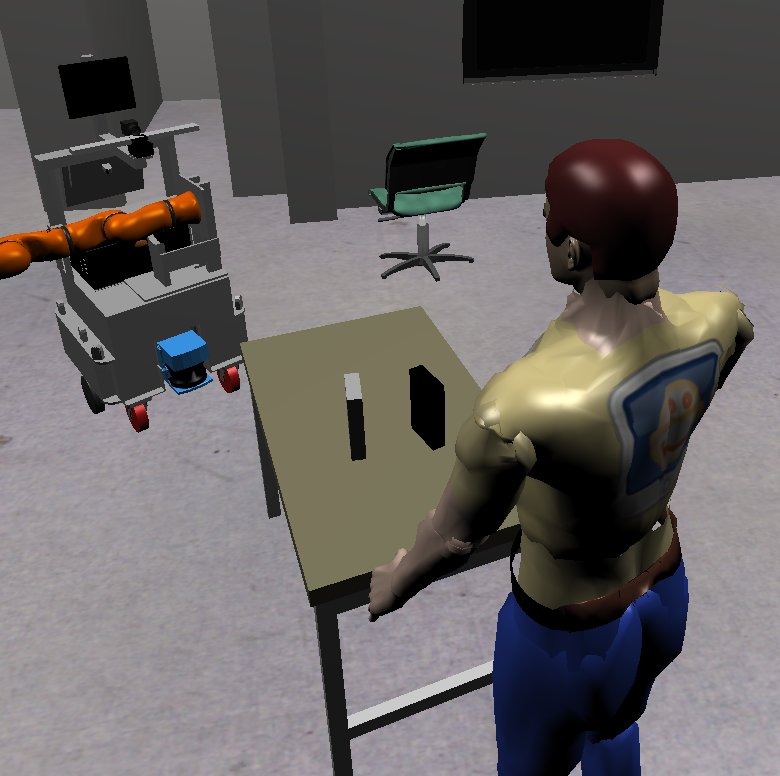
Human control¶
When starting a simulation with a human, the active camera is automatically set behind the human, in immersive mode (so-called first-person shooter view). You can switch to another camera with the F9 key.
If you are using the World Camera (CameraFP), press F5 to change if you want to control the Human or the Camera.
Motion mode¶
The human always starts in so-called Motion Mode.
- Move the character with the W, A, S, D keys
- Move the Camera around the human by moving the Mouse
- The direction of the head is controlled with the movement of the camera.
- To make the character sit, press C.
Manipulation mode¶
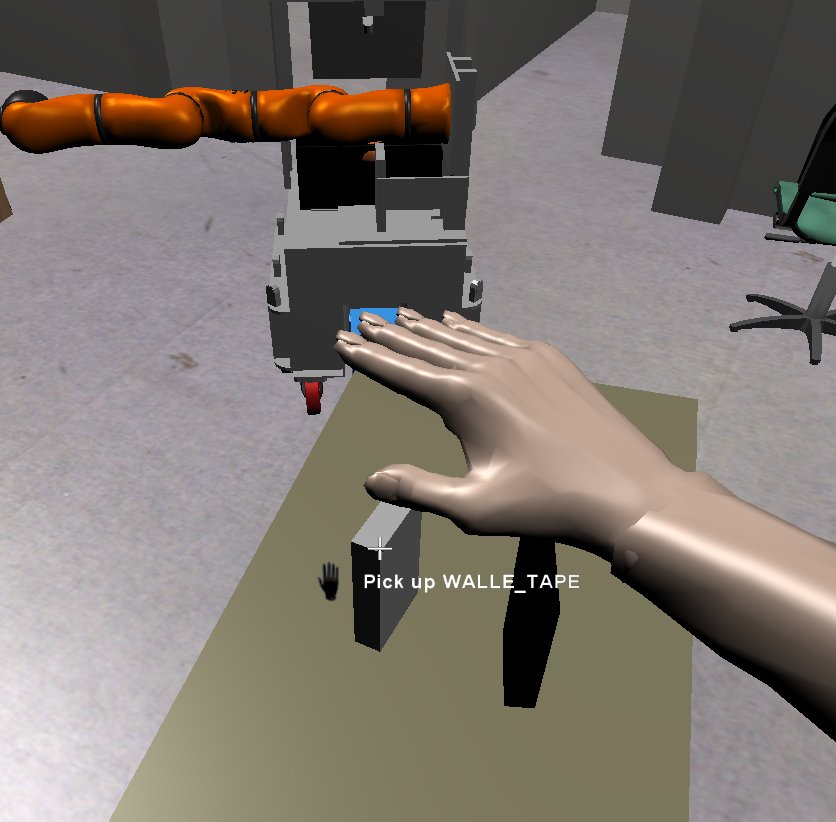
To toggle in and out of Manipulation Mode, press X.
You can move the hand by holding Middle Mouse Button and moving the Mouse. Furthermore you can roll the hand with the Mouse Wheel while holding the Left Ctrl Button.
In manipulation mode, when the hand is close enough of a graspable object (see passive objects documentation to know how to define a graspable object), a label Pickup the object appears. Press the Left Mouse Button to take the item. To lay the item down, press Right Mouse Button. To precisely lay the item down, move the crosshairs over this point. If this point is in reach (and the object that the item is to be placed on is marked as Actor in Blender’s Physic settings), a green rectangle appears. Press Right Mouse Button to lay it down. If you want to know which objects are graspable hold Alt. Their respective name will appear over every active object.
Furthermore the human can interact with the environment- namely doors, drawers and mechanical and electric devices. See Setting up a Scene with MORSE Utils on how to set up the environment for the human.
To open or close doors and drawers, simply hover the crosshairs over the door. A label Open/Close Door/Drawer should appear. Now press Left Mouse Button.
To use mechanical and electric devices you can interact with switches. Again press Left Mouse Button with the crosshairs over the switch. This way you can turn the device on and off.
Sensors and actuators¶
Currently (morse-1.3), the human component has one sensor already integrated, which exports the joint state of the human: the human posture sensor. This sensor is already embedded in the human.blend file. You don’t need to link it from a separate sensor file.
The human model can be controlled using the keyboard, or have a motion controller attached to it, so that the movement commands can come from an external software.
Services¶
- move: (Synchronous service) Move the body, or the hand in case of manipulation mode. In case of moving the body, the two arguments expected are speed and rotation. In case of moving the hand these two arguments should be X and Z displacement.
- move_head: (Synchronous service) Move the head. Two arguments expected: pan and tilt
- grasp_: (Synchronous service) Grasp and release an object if in manipulating mode. Takes one argument: must be “t” to grasp and “f” to release
- move_hand: (Synchronous service) Move the hand in the third direction ( Y, see above).
- toggle_manipulation: (Synchronous service) Switch from and to manipulation mode
![]()
Table Of Contents
Previous topic
Linear and angular speed (Vx, Vy, W) actuator