GPS¶
A GPS sensor that returns coordinates .
A GPS sensor which returns the position either in Blender or Geodetic coordinates.
This sensor always provides perfect data on the levels “raw” and “extended”. To obtain more realistic readings, it is recommended to add modifiers.
- Noise modifier: Adds random Gaussian noise to the data
coordinates in Blender: x -> east and y -> north
The “heading” is Clockwise (mathematically negative).
Warning
To work properly in “raw” and “extented” mode, you need to configure the following variables at the environment level:
- longitude in degrees (double) of Blender origin
- latitude in degrees (double) of Blender origin
- altitude in m of the Blender origin
- optionnaly angle_against_north in degrees is the angle between geographic north and the blender X axis. angle_against_north is positive when the blender X-axis is east of true north, and negative when it is to the west.
Conversion of Geodetic coordinates into ECEF-r, LTP into ECEF-r and vice versa¶
Conversion of Geodetic coordinates into ECEF-r¶
To be able to simulate a GPS-sensor P (the Blender origin) must
be defined in the properties in Geodetic coordinates (longitude,
latitude, altitude). For the transformation [Psas] the
coordinates must be in decimal degrees (no North, minutes,
etc.). The result is a point x_0 in the ECEF-r coordinates.
Conversion of ECEF-r into LTP[Psas]¶
For this conversion x_0 is the base. A point x_e is given
in the ECEF-r coordinates and the goal is to get x_t (=
x_e in the LTP-coordinates).
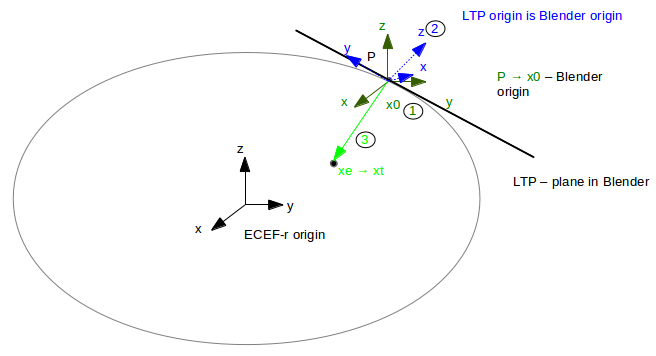
1. Transform P (Blender origin, geodetic coordinates
(stored in the properties)) into x0 (geocentric (ECEF-r)
coordinates)
2. Calculate R_{te}[1] with longitude, latitude and altitude; matrix is the rotation part of the transformation
- Transform x_e into x_t with x_t = R_{te} * (x_e-x_0)
Conversion of LTP into ECEF-r¶
Known: P in Geodetic coordinates (→ x_0 in ECEF-r) and
x_t in LTP-coordinates
Goal: x_e (= x_t in ECEF-r coordinates)
Based on the transformation described above the transformation is calculated with the transposed matrix R_{te}: x_e = x_0 + (R_{te})' * x_t [Psas]
Conversion of ECEF-r into Geodetic coordinates¶
The last transformation is from ECEF-r coordinates into Geodetic
coordinates. This transformation is calculated with the Vermeille’s method
[FoIz]. The result is the point x_e in “GPS-coordinates” in
radians.
Sources¶
“3.4 Vermeille’s Method(2002)” in “Comparative Analysis of the Performance of Iterative and Non-iterative Solutions to the Cartesian to Geodetic Coordinate Transformation”, Hok Sum Fok and H. Bâki Iz, http://www.lsgi.polyu.edu.hk/staff/zl.li/Vol_5_2/09-baki-3.pdf
“Conversion of Geodetic coordinates to the Local Tangent Plane”, Version 2.01, http://psas.pdx.edu/CoordinateSystem/Latitude_to_LocalTangent.pdf
Configuration parameters for GPS¶
No configurable parameter.
Available functional levels¶
Functional levels are predefined abstraction or realism levels for the sensor.
simple(default level) simple GPS: only current position in Blender is exportedAt this level, the sensor exports these datafields at each simulation step:
x(float, initial value:0.0): x coordinate of the sensor, in world coordinate, in metery(float, initial value:0.0): y coordinate of the sensor, in world coordinate, in meterz(float, initial value:0.0): z coordinate of the sensor, in world coordinate, in meter
Interface support:
rosas sensor_msgs/NavSatFix (morse.middleware.ros.gps.NavSatFixPublisher)socketas straight JSON serialization (morse.middleware.socket_datastream.SocketPublisher)yarpas YarpPublisher (morse.middleware.yarp_datastream.YarpPublisher)yarp_jsonas YarpJsonPublisher (morse.middleware.yarp.yarp_json.YarpJsonPublisher)textas key = value format with timestamp and index value (morse.middleware.text_datastream.Publisher)pocolibsas POM_ME_POS (morse.middleware.pocolibs.sensors.pom.PomSensorPoster) or as POM_POS (morse.middleware.pocolibs.sensors.pom.PomPoster)moosas GPSNotifier (morse.middleware.moos.gps.GPSNotifier)
rawraw GPS: position in Geodetic coordinates and velocity are exportedAt this level, the sensor exports these datafields at each simulation step:
longitude(double, initial value:0.0): longitude in degree [-180°,180] or [0°,360°]latitude(double, initial value:0.0): latitude in degree [-90°,90°]altitude(double, initial value:0.0): altitude in m a.s.l.velocity(vec3<float>, initial value:[0.0, 0.0, 0.0]): Instantaneous speed along East, North, Up in meter sec^-1
Interface support:
rosas sensor_msgs/NavSatFix (morse.middleware.ros.gps.NavSatFixRawPublisher)socketas straight JSON serialization (morse.middleware.socket_datastream.SocketPublisher)yarpas YarpPublisher (morse.middleware.yarp_datastream.YarpPublisher)yarp_jsonas YarpJsonPublisher (morse.middleware.yarp.yarp_json.YarpJsonPublisher)textas key = value format with timestamp and index value (morse.middleware.text_datastream.Publisher)
extendedextended GPS: adding information to fit a standard GPS-sentenceAt this level, the sensor exports these datafields at each simulation step:
longitude(double, initial value:0.0): longitude in degree [-180°,180] or [0°,360°]latitude(double, initial value:0.0): latitude in degree [-90°,90°]altitude(double, initial value:0.0): altitude in m a.s.l.velocity(vec3<float>, initial value:[0.0, 0.0, 0.0]): Instantaneous speed along East, North, Up in meter sec^-1date(DDMMYY, initial value:0): current date in DDMMYY-formattime(HHMMSS, initial value:0): current time in HHMMSS-formatheading(float, initial value:0): heading in degrees [0°,360°] to geographic north
Interface support:
socketas straight JSON serialization (morse.middleware.socket_datastream.SocketPublisher)yarpas YarpPublisher (morse.middleware.yarp_datastream.YarpPublisher)yarp_jsonas YarpJsonPublisher (morse.middleware.yarp.yarp_json.YarpJsonPublisher)textas key = value format with timestamp and index value (morse.middleware.text_datastream.Publisher)
Services for GPS¶
get_configurations()(blocking)Returns the configurations of a component (parsed from the properties).
Return value
a dictionary of the current component’s configurations
get_local_data()(blocking)Returns the current data stored in the sensor.
Return value
a dictionary of the current sensor’s data
get_properties()(blocking)Returns the properties of a component.
Return value
a dictionary of the current component’s properties
set_property(prop_name, prop_val)(blocking)Modify one property on a component
Parameters
prop_name: the name of the property to modify (as shown the documentation)prop_val: the new value of the property. Note that there is no checking about the type of the value so be careful
Return value
nothing
Examples¶
The following examples show how to use this component in a Builder script:
from morse.builder import *
# adds a default robot (the MORSE mascott!)
robot = Morsy()
# creates a new instance of the sensor
gps = GPS()
# place your component at the correct location
gps.translate(<x>, <y>, <z>)
gps.rotate(<rx>, <ry>, <rz>)
# select a specific abstraction level (cf below), or skip it to use default level
gps.level(<level>)
robot.append(gps)
# define one or several communication interface, like 'socket'
gps.add_interface(<interface>)
env = Environment('empty')
Other sources of examples¶
(This page has been auto-generated from MORSE module morse.sensors.gps.)